Hydraulic Universal Testing Machine WAW-600D Microcomputer ຄວບຄຸມ

ລາຍລະອຽດສັ້ນ:
WAW-600D Microcomputer Controlled Hydraulic Universal Testing Machine Overview ຜະລິດຕະພັນ: ຮ່າງກາຍຕົ້ນຕໍຂອງ WAW-600D microcomputer controlled electro-hydraulic servo hydraulic universal testing adopts cylinder down type main body structure, the mainly used for mechanical performance tests such as tension, compression , ການງໍຂອງວັດສະດຸໂລຫະ, ວັດສະດຸທີ່ບໍ່ແມ່ນໂລຫະ, ພາກສ່ວນຜະລິດຕະພັນ, ອົງປະກອບ, ອົງປະກອບໂຄງສ້າງ, ແລະມາດຕະຖານ ພາກສ່ວນ. ຖ້າມີອຸປະກອນສິ່ງແວດລ້ອມ, ຊຸດນີ້ ...
WAW-600D ໄມໂຄຄອມພິວເຕີຄວບຄຸມເຄື່ອງທົດສອບລະບົບໄຮໂດຼລິກ Universal

ພາບລວມຜະລິດຕະພັນ:
ຮ່າງກາຍຕົ້ນຕໍຂອງ WAW-600D microcomputer ຄວບຄຸມ electro-hydraulic servo hydraulic universal ເຄື່ອງທົດສອບ adopts cylinder ລົງໂຄງສ້າງຮ່າງກາຍຕົ້ນຕໍ, ສ່ວນໃຫຍ່ແມ່ນໃຊ້ສໍາລັບການທົດສອບປະສິດທິພາບກົນຈັກເຊັ່ນ: ຄວາມເຄັ່ງຕຶງ, ການບີບອັດ, ງໍຂອງວັດສະດຸໂລຫະ, ວັດສະດຸທີ່ບໍ່ແມ່ນໂລຫະ, ຜະລິດຕະພັນ. ພາກສ່ວນ, ອົງປະກອບ, ອົງປະກອບໂຄງສ້າງ, ແລະພາກສ່ວນມາດຕະຖານ.
ຖ້າຫາກວ່າມີອຸປະກອນສະພາບແວດລ້ອມ, ເຄື່ອງທົດສອບຊຸດນີ້ຍັງສາມາດປະຕິບັດການທົດສອບ tensile, compression ແລະການບິດວັດຖຸໃນສະພາບແວດລ້ອມທີ່. ຕົວຢ່າງ: ອຸນຫະພູມສູງ tensile, ອຸນຫະພູມຕ່ໍາ tensile, compression ແລະການທົດສອບອື່ນໆ.
ເຫມາະສໍາລັບເຫຼັກກ້າ, ໂລຫະ, ວັດສະດຸກໍ່ສ້າງ, ສູນກວດກາຄຸນນະພາບ, ການອະນຸລັກນ້ໍາແລະໄຟຟ້ານ້ໍາຕົກ, ຂົວທາງດ່ວນ, ສະຖາບັນຄົ້ນຄ້ວາ, ວິສະວະກໍາກົນຈັກໃນວິທະຍາໄລແລະວິທະຍາໄລ, ແລະໂຮງງານຜະລິດອື່ນໆ, ບໍ່ແຮ່, ວິສາຫະກິດ, ແລະສະຖາບັນການທົດສອບແລະການຄົ້ນຄວ້າ.
ມາດຕະຖານການຜະລິດແລະການກວດກາຜະລິດຕະພັນ
GB2611 "ຄວາມຕ້ອງການດ້ານວິຊາການທົ່ວໄປສໍາລັບເຄື່ອງທົດສອບ"
JJG139 “ແຮງດຶງ, ຄວາມກົດດັນ, ແລະເຄື່ອງທົດສອບທົ່ວໄປ“
ມາດຕະຖານວິທີການທົດສອບທີ່ໃຊ້ໄດ້
ການດໍາເນີນງານການທົດລອງແລະການປະມວນຜົນຂໍ້ມູນຕອບສະຫນອງຄວາມຕ້ອງການຂອງຫຼາຍຮ້ອຍມາດຕະຖານເຊັ່ນ GB / T228 "ວິທີການທົດສອບແຮງດັນສໍາລັບວັດສະດຸໂລຫະໃນອຸນຫະພູມຫ້ອງ", GB / T7314 "ວິທີການທົດສອບການບີບອັດສໍາລັບວັດສະດຸໂລຫະທີ່ອຸນຫະພູມຫ້ອງ", GB / T232 "ບິດ. ວິທີການທົດສອບສໍາລັບວັດສະດຸໂລຫະ”, ແລະອື່ນໆ. ແລະວິທີການປະມວນຜົນຂໍ້ມູນທີ່ຕອບສະຫນອງມາດຕະຖານທີ່ແຕກຕ່າງກັນສາມາດໄດ້ຮັບການ configured ຕາມຄວາມຕ້ອງການຂອງລູກຄ້າ.
ຕົວຊີ້ວັດດ້ານວິຊາການຕົ້ນຕໍ
1 ເຈົ້າພາບ
ເຄື່ອງຈັກຕົ້ນຕໍຮັບຮອງເອົາປະເພດກະບອກນ້ໍາມັນທີ່ຕິດຢູ່ດ້ານລຸ່ມ, ໂດຍມີພື້ນທີ່ຍືດຍາວຢູ່ເຫນືອເຄື່ອງຈັກຕົ້ນຕໍ, ແລະພື້ນທີ່ທົດສອບການບີບອັດແລະການງໍຕັ້ງຢູ່ລະຫວ່າງກາງຕ່ໍາຂອງເຄື່ອງຈັກຕົ້ນຕໍແລະຕາຕະລາງເຮັດວຽກ.
2 ລະບົບສາຍສົ່ງ
ການຍົກຂອງ crossbeam ກາງຮັບຮອງເອົາ motor ຂັບເຄື່ອນໂດຍລໍ້ລະບົບຕ່ອງໂສ້ rotate screw ໄດ້, ປັບຕໍາແຫນ່ງ spatial ຂອງ crossbeam ກາງແລະບັນລຸການປັບຄວາມກົດດັນແລະຊ່ອງບີບອັດ.
ຫຼັກການລະບົບໄຮໂດຼລິກຂອງລະບົບໄຮໂດຼລິກແມ່ນສະແດງຢູ່ໃນຮູບທີ 2, ເຊິ່ງເປັນລະບົບຄວບຄຸມຄວາມໄວການໂຫຼດຂອງນ້ໍາມັນ inlet throttling.
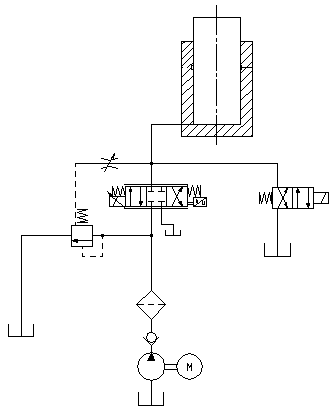
ຮູບທີ 2 ແຜນວາດລະບົບໄຮໂດຼລິກ
ນ້ໍາມັນໄຮໂດຼລິກໃນຖັງນ້ໍາມັນແມ່ນຂັບເຄື່ອນໂດຍມໍເຕີເພື່ອເຂົ້າໄປໃນວົງຈອນນ້ໍາມັນ, ແລະໄຫຼຜ່ານປ່ຽງຫນຶ່ງ, ການກັ່ນຕອງນ້ໍາມັນຄວາມກົດດັນສູງ, ກຸ່ມວາວຄວາມກົດດັນທີ່ແຕກຕ່າງກັນ, ປ່ຽງ servo, ແລະເຂົ້າໄປໃນກະບອກນ້ໍາມັນ. ຄອມພິວເຕີສົ່ງສັນຍານການຄວບຄຸມໄປຍັງປ່ຽງ servo ອັດຕາສ່ວນເພື່ອຄວບຄຸມການເປີດແລະທິດທາງຂອງປ່ຽງ servo ອັດຕາສ່ວນ, ດັ່ງນັ້ນການຄວບຄຸມການໄຫຼເຂົ້າໄປໃນກະບອກນ້ໍາມັນແລະບັນລຸການຄວບຄຸມຂອງຜົນບັງຄັບໃຊ້ການທົດສອບຄວາມໄວຄົງທີ່, ການຍ້າຍຄວາມໄວຄົງທີ່, ແລະອື່ນໆ.
4. ລະບົບການວັດແທກ ແລະ ຄວບຄຸມໄຟຟ້າ:
(1) ອົງປະກອບຫຼັກຂອງແຫຼ່ງນ້ໍາມັນຄວບຄຸມ servo ແມ່ນສ່ວນປະກອບຕົ້ນສະບັບທີ່ນໍາເຂົ້າທັງຫມົດທີ່ມີການປະຕິບັດທີ່ຫມັ້ນຄົງ.
(2) ມັນມີຫນ້າທີ່ປ້ອງກັນເຊັ່ນ overload, overcurrent, overvoltage, displacement ເທິງແລະຕ່ໍາຂອບເຂດຈໍາກັດ, ແລະຢຸດສຸກເສີນ.
(3) ຕົວຄວບຄຸມທີ່ສ້າງຂຶ້ນໂດຍອີງໃສ່ເທກໂນໂລຍີ PCI ຮັບປະກັນວ່າເຄື່ອງທົດສອບສາມາດບັນລຸການຄວບຄຸມປິດວົງຂອງຕົວກໍານົດການເຊັ່ນ: ຜົນບັງຄັບໃຊ້ການທົດສອບ, ການຜິດປົກກະຕິຂອງຕົວຢ່າງ, ແລະ beam displacement, ແລະສາມາດປະຕິບັດການທົດສອບເຊັ່ນ: ຜົນບັງຄັບໃຊ້ການທົດສອບຄວາມໄວຄົງທີ່, ຄວາມໄວຄົງທີ່. ການເຄື່ອນຍ້າຍ, ຄວາມໄວຄົງທີ່, ວົງຈອນການໂຫຼດຄວາມໄວຄົງທີ່, ແລະວົງຈອນການຜິດປົກກະຕິຂອງຄວາມໄວຄົງທີ່. ການສະຫຼັບລະຫວ່າງຮູບແບບການຄວບຄຸມຕ່າງໆແມ່ນເປັນໄປໄດ້.
(4) ໃນຕອນທ້າຍຂອງການທົດລອງ, ມັນສາມາດກັບຄືນດ້ວຍຕົນເອງຫຼືອັດຕະໂນມັດກັບຕໍາແຫນ່ງເບື້ອງຕົ້ນຂອງການທົດລອງດ້ວຍຄວາມໄວສູງ.
(5) ມັນໄດ້ບັນລຸສູນທາງດ້ານຮ່າງກາຍທີ່ແທ້ຈິງ, ການປັບຕົວ, ແລະການປ່ຽນອັດຕະໂນມັດ, zeroing, calibration, ແລະປະຫຍັດການວັດແທກຜົນບັງຄັບໃຊ້ໃນການທົດລອງ, ໂດຍບໍ່ມີການເຊື່ອມຕໍ່ການປັບຕົວແບບປຽບທຽບ, ແລະວົງຈອນຄວບຄຸມແມ່ນປະສົມປະສານສູງ.
(6) ວົງຈອນຄວບຄຸມໄຟຟ້າປະຕິບັດຕາມມາດຕະຖານສາກົນ ແລະ ປະຕິບັດຕາມມາດຕະຖານໄຟຟ້າຂອງເຄື່ອງທົດສອບແຫ່ງຊາດ. ມັນມີຄວາມສາມາດຕ້ານການແຊກແຊງທີ່ເຂັ້ມແຂງ, ຮັບປະກັນຄວາມຫມັ້ນຄົງຂອງຕົວຄວບຄຸມແລະຄວາມຖືກຕ້ອງຂອງຂໍ້ມູນການທົດລອງ.
(7) ອຸປະກອນທີ່ມີການໂຕ້ຕອບການສົ່ງຜ່ານເຄືອຂ່າຍ, ມັນສາມາດປະຕິບັດການສົ່ງຂໍ້ມູນ, ການເກັບຮັກສາ, ບັນທຶກການພິມແລະການພິມການສົ່ງຜ່ານເຄືອຂ່າຍ, ແລະສາມາດເຊື່ອມຕໍ່ກັບເຄືອຂ່າຍ LAN ພາຍໃນຫຼືອິນເຕີເນັດຂອງວິສາຫະກິດ.
5. ລາຍລະອຽດຂອງຄຸນສົມບັດທີ່ເປັນປະໂຫຍດຕົ້ນຕໍຂອງຊອບແວ
ຊອບແວການວັດແທກແລະຄວບຄຸມນີ້ແມ່ນໃຊ້ສໍາລັບເຄື່ອງທົດສອບລະບົບໄຮໂດຼລິກ servo ທີ່ມີການຄວບຄຸມໄຟຟ້າຈຸລະພາກເພື່ອດໍາເນີນການທົດສອບໂລຫະແລະທີ່ບໍ່ແມ່ນໂລຫະຕ່າງໆ, ການວັດແທກແລະການສະແດງຜົນໃນເວລາຈິງ, ການຄວບຄຸມເວລາທີ່ແທ້ຈິງແລະການປຸງແຕ່ງຂໍ້ມູນ, ຜົນໄດ້ຮັບແລະຫນ້າທີ່ອື່ນໆຕາມການວັດແທກ. ກັບມາດຕະຖານທີ່ສອດຄ້ອງກັນ.
(1) ການຄຸ້ມຄອງໂດຍອີງໃສ່ການອະນຸຍາດ, ບ່ອນທີ່ຜູ້ປະກອບການໃນລະດັບຕ່າງໆມີການອະນຸຍາດການດໍາເນີນງານທີ່ແຕກຕ່າງກັນແລະການເຂົ້າເຖິງເມນູແລະເນື້ອຫາອື່ນໆ. ນີ້ບໍ່ພຽງແຕ່ເຮັດໃຫ້ຄວາມງ່າຍດາຍ, ອໍານວຍຄວາມສະດວກ, ແລະຄວາມໄວການດໍາເນີນງານສໍາລັບຜູ້ປະຕິບັດງານທໍາມະດາ, ແຕ່ຍັງປົກປ້ອງລະບົບຢ່າງມີປະສິດທິພາບ;
(2) ການວັດແທກເວລາທີ່ແທ້ຈິງແລະການສະແດງຜົນບັງຄັບໃຊ້ການທົດສອບ, ມູນຄ່າສູງສຸດ, ການເຄື່ອນຍ້າຍ, ການຜິດປົກກະຕິແລະສັນຍານອື່ນໆ; ການເກັບກໍາແລະການຄວບຄຸມທີ່ໃຊ້ເວລາທີ່ແທ້ຈິງໄດ້ບັນລຸຜົນໃນເວທີ; ແລະບັນລຸເວລາທີ່ຊັດເຈນແລະການເກັບຕົວຢ່າງຄວາມໄວສູງ;
(3) ການສະແດງຫນ້າຈໍເວລາທີ່ແທ້ຈິງຂອງເສັ້ນໂຄ້ງການທົດສອບຕ່າງໆເຊັ່ນ: ການປ່ຽນຮູບແບບການໂຫຼດແລະການເຄື່ອນຍ້າຍການໂຫຼດໄດ້ຖືກບັນລຸ, ເຊິ່ງສາມາດປ່ຽນແລະສັງເກດເຫັນໄດ້ທຸກເວລາ. ການຊູມເຂົ້າແລະອອກຈາກເສັ້ນໂຄ້ງແມ່ນສະດວກຫຼາຍ;
(4) ຄອມພິວເຕີມີຫນ້າທີ່ເຊັ່ນການເກັບຮັກສາ, ການຕັ້ງຄ່າແລະການໂຫຼດຕົວກໍານົດການທົດລອງ. Zeroing, calibration, ແລະການດໍາເນີນງານອື່ນໆແມ່ນດໍາເນີນໂດຍຜ່ານຊອບແວ, ແລະແຕ່ລະພາລາມິເຕີສາມາດເກັບຮັກສາແລະນໍາເຂົ້າໄດ້ງ່າຍ, ເຮັດໃຫ້ມັນງ່າຍທີ່ຈະປ່ຽນລະຫວ່າງເຊັນເຊີຫຼາຍໃນເຈົ້າພາບໂດຍບໍ່ມີການຈໍາກັດຈໍານວນຂອງເຊັນເຊີ;
(5) ສະຫນັບສະຫນູນວິທີການຄວບຄຸມຫຼາຍ, ລວມທັງການເລື່ອນຄວາມໄວຄົງທີ່ຂອງວົງເປີດ, ຜົນບັງຄັບໃຊ້ຄວາມໄວຄົງທີ່, ຄວາມກົດດັນຄວາມໄວຄົງທີ່, ແລະວິທີການຄວບຄຸມວົງປິດອື່ນໆ; ແລະສະຫນອງເສັ້ນໂຄ້ງອ້າງອິງມາດຕະຖານໃນລະຫວ່າງຂະບວນການ debugging ຂອງຕົວກໍານົດການວົງປິດໂດຍຜູ້ປະກອບການຂັ້ນສູງ, ດັ່ງນັ້ນຜູ້ໃຊ້ສາມາດສັງເກດເຫັນຜົນກະທົບຂອງແຕ່ລະພາລາມິເຕີກ່ຽວກັບຜົນກະທົບຂອງວົງປິດ.
(6) ປະກອບດ້ວຍລະບົບຜູ້ຊ່ຽວຊານອັດສະລິຍະເພື່ອກໍານົດຮູບແບບການຄວບຄຸມຂະບວນການທົດລອງ, ໃຫ້ຜູ້ໃຊ້ມືອາຊີບທີ່ມີໂປແກຼມໂປຼແກຼມອັດຕະໂນມັດ. ຜູ້ໃຊ້ສາມາດປະສົມປະສານຫຼາຍວິທີຄວບຄຸມແລະຄວບຄຸມຄວາມໄວຕາມຄວາມຕ້ອງການຕົວຈິງແລະກົດລະບຽບ, ແລະພັດທະນາໂຄງການຄວບຄຸມທີ່ເຫມາະສົມກັບຄວາມຕ້ອງການຂອງພວກເຂົາ. ຊອບແວການວັດແທກແລະຄວບຄຸມອັດຕະໂນມັດຈະຄວບຄຸມຂະບວນການທົດສອບຕາມການຕັ້ງຄ່າຂອງຜູ້ໃຊ້.
(7) ວິເຄາະຂໍ້ມູນຜ່ານການໂຕ້ຕອບມະນຸດກັບຄອມພິວເຕີ. ວິທີການປຸງແຕ່ງຕອບສະຫນອງຄວາມຕ້ອງການຂອງມາດຕະຖານການນໍາໃຊ້ຢ່າງກວ້າງຂວາງແລະສາມາດຄິດໄລ່ອັດຕະໂນມັດຕົວກໍານົດການປະສິດທິພາບຕ່າງໆເຊັ່ນ: ໂມດູລ elastic, ຄວາມເຂັ້ມແຂງຜົນຜະລິດ, ແລະຄວາມແຮງ tensile ທີ່ບໍ່ແມ່ນອັດຕາສ່ວນທີ່ກໍານົດໄວ້. ມັນຍັງສາມາດແຊກແຊງດ້ວຍຕົນເອງໃນຂະບວນການວິເຄາະເພື່ອປັບປຸງຄວາມຖືກຕ້ອງຂອງການວິເຄາະ; ການປະມວນຜົນຂໍ້ມູນອື່ນໆຍັງສາມາດປະຕິບັດໄດ້ຕາມມາດຕະຖານທີ່ໃຫ້ໂດຍຜູ້ໃຊ້.
(8) ຂໍ້ມູນການທົດລອງໄດ້ຖືກເກັບໄວ້ໃນໄຟລ໌ຂໍ້ຄວາມສໍາລັບການສອບຖາມຜູ້ໃຊ້ທີ່ສະດວກ, ແລະສາມາດປະຕິບັດເພີ່ມເຕີມໂດຍນໍາໃຊ້ບົດລາຍງານການຄ້າທົ່ວໄປຫຼືຊອບແວປະມວນຜົນຄໍາສັບຕ່າງໆ, ໃນຂະນະທີ່ຍັງອໍານວຍຄວາມສະດວກການສົ່ງຂໍ້ມູນຜ່ານອິນເຕີເນັດ;
(9) ເສັ້ນໂຄ້ງຂໍ້ມູນຂອງຂະບວນການທົດລອງສາມາດບັນທຶກແລະບັນທຶກ, ແລະເສັ້ນໂຄ້ງສາມາດ overlay ແລະປຽບທຽບສໍາລັບການວິເຄາະການປຽບທຽບງ່າຍ;
(10) ບົດລາຍງານການທົດສອບສາມາດພິມອອກໃນຮູບແບບທີ່ຕ້ອງການໂດຍຜູ້ໃຊ້. ຜູ້ໃຊ້ສາມາດເລືອກເນື້ອໃນຂອງບົດລາຍງານໃຫ້ຂໍ້ມູນພື້ນຖານ, ຜົນໄດ້ຮັບການທົດລອງ, ແລະເສັ້ນໂຄ້ງຂອງການທົດລອງເພື່ອຕອບສະຫນອງຄວາມຕ້ອງການຕ່າງໆ;
(11) ການສູນດິຈິຕອນແລະການປັບອັດຕະໂນມັດຂອງຜົນບັງຄັບໃຊ້ໃນການທົດລອງແລະການຜິດປົກກະຕິໄດ້ຖືກບັນລຸ, ເຊິ່ງອໍານວຍຄວາມສະດວກໃນການດໍາເນີນງານແລະປັບປຸງຄວາມຫນ້າເຊື່ອຖືຂອງເຄື່ອງຈັກ. ການຕັ້ງຄ່າລະບົບພາລາມິເຕີຕ່າງໆຖືກເກັບໄວ້ໃນຮູບແບບໄຟລ໌ເພື່ອປະຫຍັດແລະຟື້ນຕົວໄດ້ງ່າຍ;
(12) ສາມາດນໍາໃຊ້ກັບລະບົບປະຕິບັດການ Win7. ການຄວບຄຸມຂອງຂະບວນການທົດລອງ, ການປ່ຽນແປງຄວາມໄວຂອງການເຄື່ອນໄຫວ crossbeam, ການປ້ອນຂໍ້ມູນພາລາມິເຕີ, ແລະການດໍາເນີນງານອື່ນໆສາມາດສໍາເລັດທັງຫມົດໂດຍໃຊ້ແປ້ນພິມຫຼືຫນູ, ເຮັດໃຫ້ມັນສະດວກແລະໄວໃນການນໍາໃຊ້;
(13) ມາພ້ອມກັບການປ້ອງກັນ overload ແລະຟັງຊັນປິດອັດຕະໂນມັດ, ມັນສາມາດກວດພົບການແຕກຫັກຂອງຕົວຢ່າງແລະປິດອັດຕະໂນມັດ.
ອີງຕາມຄວາມຕ້ອງການຂອງຜູ້ໃຊ້ທີ່ແຕກຕ່າງກັນ, ຫນ້າທີ່ຊອບແວຂ້າງເທິງອາດຈະຖືກປັບຫຼືດັດແປງ.
6. ຊອບແວແລະການໂຕ້ຕອບການດໍາເນີນງານຊອບແວ:
(1) ຊອບແວສາມາດດໍາເນີນການໃນລະບົບ Windows 7, ແລະການໂຕ້ຕອບຜູ້ໃຊ້ນໍາສະເຫນີລະບົບປ່ອງຢ້ຽມຂອງຈີນສອດຄ່ອງກັບຮູບແບບ Windows. ການດໍາເນີນການທົດລອງທັງຫມົດສາມາດສໍາເລັດໂດຍຜ່ານການປ້ອນຫນູໃນຫນ້າຈໍຄອມພິວເຕີ.
ການໂຕ້ຕອບຕົ້ນຕໍຂອງເຄື່ອງທົດສອບ
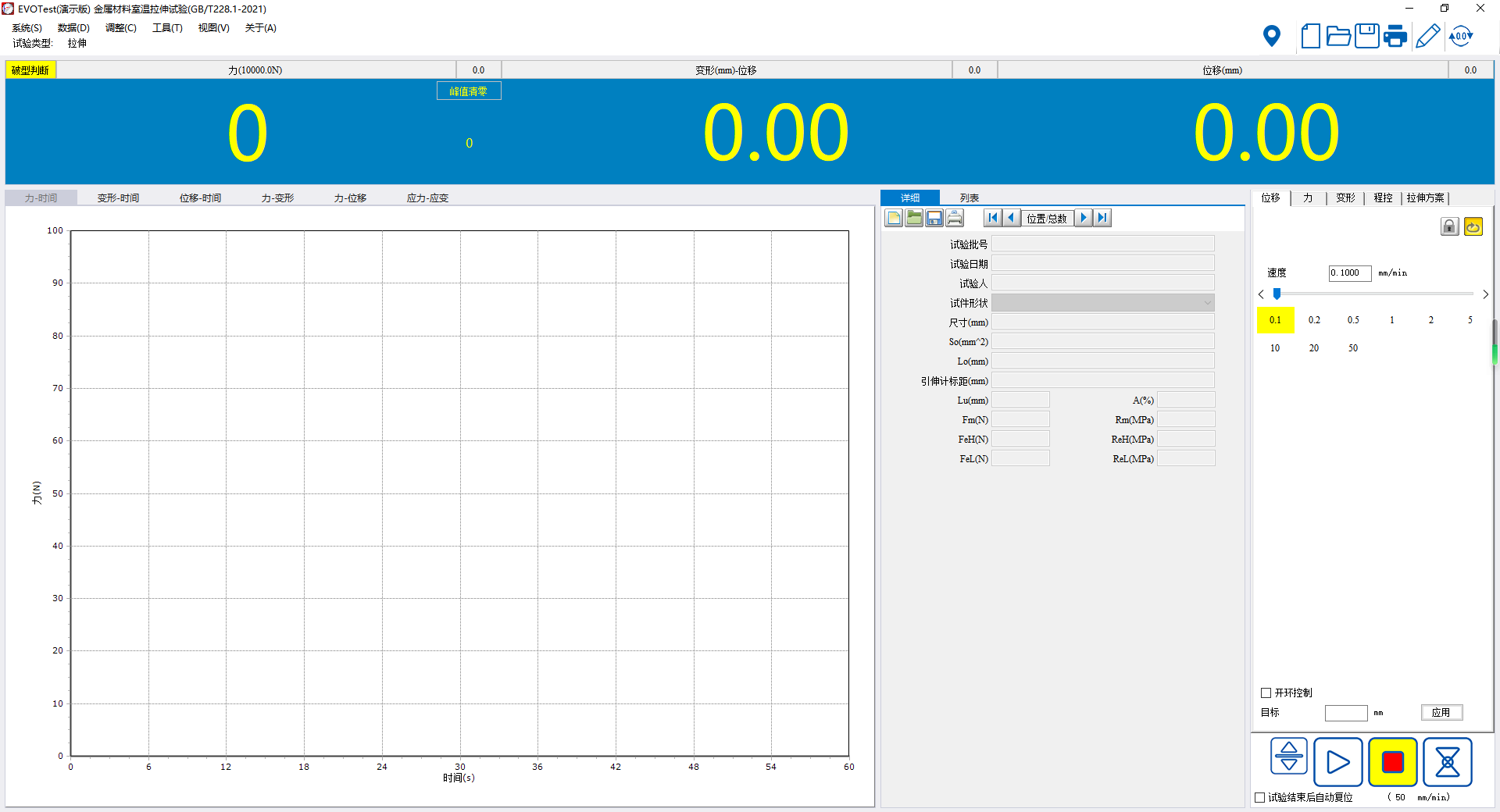
(ການໂຕ້ຕອບຊອບແວແມ່ນແຕກຕ່າງກັນເລັກນ້ອຍ, ສ່ວນໃຫຍ່ແມ່ນອີງໃສ່ຄວາມເປັນຈິງ)
7. ບົດລາຍງານການທົດສອບ:
ຄົ້ນຫາແລະຈັດການຂໍ້ມູນການທົດລອງໂດຍຜ່ານໄຟລ໌ຂໍ້ມູນທົດລອງ; ປັບແຕ່ງເນື້ອຫາ ແລະຮູບແບບຂອງບົດລາຍງານການທົດລອງຜ່ານການຕັ້ງຄ່າແມ່ແບບລາຍງານ; ໂດຍການແກ້ໄຂສູດແລະລາຍການຜົນໄດ້ຮັບ, ການສະຫນັບສະຫນູນສ່ວນໃຫຍ່ຂອງມາດຕະຖານແລະວິທີການທົດລອງສາມາດບັນລຸໄດ້; ຫຼັງຈາກການໂຫຼດໄຟລ໌ຂໍ້ມູນການທົດສອບຫນຶ່ງຫຼືຫຼາຍ, ສ້າງບົດລາຍງານການທົດສອບຕາມແມ່ແບບບົດລາຍງານແລະພິມອອກ; ສະຫນັບສະຫນູນແມ່ແບບບົດລາຍງານ Word ແລະ Excel, ແລະສາມາດແກ້ໄຂໄດ້ freely;
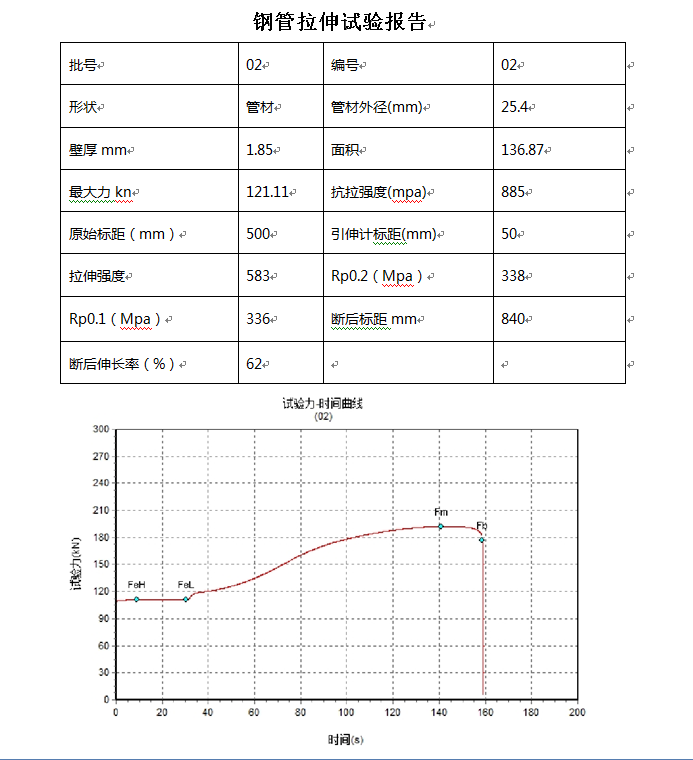
(ຂໍ້ມູນແມ່ນສໍາລັບການອ້າງອິງເທົ່ານັ້ນແລະບໍ່ມີຄວາມສໍາຄັນປະຕິບັດ)
8. ອຸປະກອນປ້ອງກັນຄວາມປອດໄພ
(1) ເມື່ອຜົນບັງຄັບໃຊ້ການທົດສອບເກີນ 2% -5% ຂອງຜົນບັງຄັບໃຊ້ການທົດສອບສູງສຸດ, ການປ້ອງກັນການໂຫຼດເກີນແມ່ນເປີດໃຊ້ງານແລະລະບົບຈະ unloaded.
(2) ເມື່ອ piston ເພີ່ມຂຶ້ນເຖິງຕໍາແຫນ່ງຈໍາກັດເທິງ, ການປ້ອງກັນເສັ້ນເລືອດຕັນໃນຢຸດແລະມໍເຕີປັ໊ມນ້ໍາມັນຢຸດ.
ການປະຕິບັດຕົ້ນຕໍແລະຕົວຊີ້ວັດດ້ານວິຊາການ
| ບໍ່. | ຊື່ໂຄງການ | ພາລາມິເຕີ |
| 1 | ແຮງທົດສອບສູງສຸດ kN | ຫົກຮ້ອຍ |
| 2 | ໂຄງສ້າງເຈົ້າພາບ | ສີ່ເສົາຫຼັກແລະສອງ screws ນໍາ |
| 3 | ຄວາມຜິດພາດທີ່ກ່ຽວຂ້ອງຂອງຕົວຊີ້ວັດຜົນບັງຄັບໃຊ້ການທົດສອບ | ≤ ± 1% ຂອງຄ່າທີ່ລະບຸ |
| 4 | ໄລຍະການວັດແທກຜົນບັງຄັບໃຊ້ | 2% ~ 100% ຂອງຜົນບັງຄັບໃຊ້ການທົດສອບສູງສຸດ |
| 5 | ໄລຍະການຄວບຄຸມຄວາມກົດດັນຄວາມໄວຄົງທີ່ (N/mm2 · S-1) | 2~60 |
| 6 | ໄລຍະການຄວບຄຸມຄວາມເຄັ່ງຕຶງຄົງທີ່ | 0.00025/s~0.0025/s |
| 7 | ໄລຍະການຄວບຄຸມການຍ້າຍຄວາມໄວຄົງທີ່ (ມມ/ນາທີ) | 0.5~50 |
| 8 | ລະບົບຍຶດ | clamping ໄຮໂດຼລິກ |
| 9 | ເສັ້ນຜ່າສູນກາງຂອງຕົວຍຶດວົງກົມ mm | ເລືອກຊຸດໃດນຶ່ງພາຍໃນຂອບເຂດ Φ 6 ຫາ Φ 40 |
| 10 | ລະດັບຄວາມຫນາຂອງ clamping ຮາບພຽງ mm | 0~15 |
| 11 | ຮາບພຽງ clamping width mm | ເຈັດສິບ |
| 12 | ພື້ນທີ່ທົດສອບແຮງດັນສູງສຸດ mm | 550 (ປັບຂະຫນາດໄດ້) |
| 13 | ພື້ນທີ່ທົດສອບການບີບອັດສູງສຸດ mm | 500 (ປັບຂະຫນາດໄດ້) |
| 14 | ຕູ້ຄວບຄຸມຂະຫນາດພາຍນອກ mm | 1100×620×850 |
| 15 | ຂະໜາດຂອງເຈົ້າພາບໃນມີລີແມັດ | 900 × 630 × 2300 (ຂະຫນາດສາມາດປັບແຕ່ງໄດ້) |
| 16 | ພະລັງງານມໍເຕີ kW | ສອງຈຸດສາມ |
| 17 | ນ້ໍາຫນັກເຈົ້າພາບ kg | ຫນຶ່ງພັນຫ້າຮ້ອຍ |
| 18 | ໄລຍະກາງຖັນ (ມມ) | ສີ່ຮ້ອຍຫ້າສິບ |
| 19 | ແຜ່ນຄວາມກົດດັນດ້ານເທິງແລະຕ່ໍາຂະຫນາດ mm | Φ160 |
| 20 | ໂຄ້ງສະຫນັບສະຫນູນ rod spacing mm | 450 (ປັບຂະຫນາດໄດ້) |
| 21 | Bending support rod width mm | 140 (ປັບຂະຫນາດໄດ້) |
| 22 | ອະນຸຍາດໃຫ້ອົງສາງໍ mm | 100 (ປັບຂະຫນາດໄດ້) |
| 23 | ສູງສຸດຂອງ piston stroke mm | ສອງຮ້ອຍ |
| 24 | ຄວາມໄວການເຄື່ອນໄຫວລູກສູບສູງສຸດ mm/min | ປະມານ 60 |
| 25 | ຄວາມໄວການປັບພື້ນທີ່ທົດລອງ mm/min | ປະມານ 150 |
ການຕັ້ງຄ່າມາດຕະຖານ
| ບໍ່. | ຊື່ | ຂໍ້ມູນຈໍາເພາະ | ຈຳນວນ. | ຂໍ້ສັງເກດ |
| 1 | ເຈົ້າພາບ |
| 1 ຊຸດ | ຜະລິດເອງ |
| 2 | ແຫຼ່ງນ້ໍາມັນຄວບຄຸມ Servo |
| 1 ຊຸດ | ຜະລິດເອງ |
| 4 | ຕູ້ຄວບຄຸມ |
| 1 ຊຸດ | ຜະລິດເອງ |
| 5 | ລະບົບການວັດແທກແລະການຄວບຄຸມ |
| 1 ຊຸດ | ຜະລິດເອງ |
| 6 | ເຊັນເຊີທີ່ເວົ້າລໍ້ |
| 1pcs | ການທົດສອບກ້ວາງ |
| 7 | ຂະຫຍາຍຕົວເຂົ້າລະຫັດ |
| 1pcs | ຈິນານ |
| 8 | ຄອມພິວເຕີ |
| 1 ຊຸດ | HP |
| 9 | ເຄື່ອງພິມ |
| 1 ຊຸດ | HP |
| 10 | ຄາງກະໄຕຮູບຊົງກົມ | ເລືອກຄູ່ໃດນຶ່ງພາຍໃນຂອບເຂດຂອງ Φ 6- Φ 13, Φ 13- Φ 26, ແລະ Φ 26- Φ 40 | 1pcs | ຜະລິດເອງ
|
| 11 | ຄາງກະໄຕ Flat ຕົວຢ່າງ mm | 0~15 | 1pcs | |
| 12 | ການບີບອັດໄຟລ໌ແນບ mm | Φ150 | 1 ຊຸດ | ຜະລິດເອງ |
| 13 | ປ້ຳນ້ຳມັນ |
| 1 ຊຸດ | Mazzic, ອີຕາລີ |
| 14 | ເຄື່ອງຈັກໄຟຟ້າ |
| 1 ຊຸດ | Shanghai Songhui |
| 15 | ເອກະສານດ້ານວິຊາການ | ຄູ່ມືຜູ້ໃຊ້, ບັນຊີລາຍຊື່ການຫຸ້ມຫໍ່, ໃບຢັ້ງຢືນການສອດຄ່ອງ | 1pcs | ຜະລິດເອງ |
ຂັ້ນຕອນການດໍາເນີນງານ:
ຂັ້ນຕອນການດໍາເນີນງານສໍາລັບເຄື່ອງທົດສອບ servo electro-hydraulic
1. ເລີ່ມຕົ້ນຄອມພິວເຕີແລະເຂົ້າໄປໃນຊອບແວ
2. ເລີ່ມເປີດສະວິດໄຟ ແລະແຫຼ່ງນໍ້າມັນຂອງຕົວຄວບຄຸມ servo electro-hydraulic
3. ປັບກາງ crossbeam ຂອງເຈົ້າພາບເຄື່ອງທົດສອບໃຫ້ຢູ່ໃນຕໍາແຫນ່ງທີ່ເຫມາະສົມ, ແລະປ່ຽນ fixture ທີ່ເຫມາະສົມຕາມຮູບຮ່າງ, ຂະຫນາດ, ແລະຈຸດປະສົງການທົດລອງຂອງຕົວຢ່າງ.
4. ເປີດສະວິດໄຟຂອງປ້ຳນ້ຳມັນ ແລະຍົກກະບອກນ້ຳມັນຂອງເຄື່ອງທົດສອບເພື່ອກຳຈັດນ້ຳໜັກຂອງຕົນເອງ. (ທ່ານສາມາດເລືອກເອົາຄວາມໄວການຍ້າຍຂອງ 10mm / ນາທີແລະຄລິກໃສ່ປຸ່ມ [Up] ເພື່ອຍົກກະບອກນ້ໍາມັນຂຶ້ນປະມານ 1mm).
5. ໃສ່ຂໍ້ມູນທີ່ກ່ຽວຂ້ອງກ່ຽວກັບຮູບແບບໃນສະບັບຂໍ້ມູນຂອງຊອບແວ.
6. ຫຼັງຈາກຍຶດແບບໃສ່ຄາງກະໄຕເທິງແລ້ວ, ປັບຄ່າຜົນບັງຄັບໃຊ້ເປັນສູນ, ປັບຕົວຕັດກາງໃຫ້ຢູ່ໃນຕຳແໜ່ງທີ່ເໝາະສົມ, ຍຶດຄາງກະໄຕລຸ່ມ, ແລະຕັ້ງການເຄື່ອນທີ່ ແລະ ການປ່ຽນຮູບແບບໃໝ່. (ຮູບແບບຄວນຖືກຍຶດໄວ້ຫຼາຍກວ່າ 80% ຂອງຄາງກະໄຕທັງໝົດ, ແລະຮັກສາແນວຕັ້ງ ແລະໃຫ້ສອດຄ່ອງ)
7. ເລືອກຄວາມໄວຫຼືແຜນການທີ່ເຫມາະສົມ, ໃຫ້ຄລິກໃສ່ປຸ່ມ【ເລີ່ມຕົ້ນ】ໃນຊອບແວ, ແລະດໍາເນີນການທົດລອງ
ຫຼັງຈາກກະດູກຫັກຂອງຕົວຢ່າງ, ການທົດສອບອັດຕະໂນມັດຈະສິ້ນສຸດລົງ. ເພື່ອເບິ່ງຂໍ້ມູນການທົດລອງ, ໃຫ້ຄລິກໃສ່ສະບັບຂໍ້ມູນໃນຊອບແວເພື່ອເບິ່ງຂໍ້ມູນທີ່ຕ້ອງການ
ຫຼັງຈາກສໍາເລັດຂອງການທົດສອບຕົວຢ່າງທັງຫມົດ, ລູກສູບທໍ່ນ້ໍາມັນຕົກຢູ່ດ້ານລຸ່ມຂອງກະບອກນ້ໍາມັນແລະສະຫວິດຕົ້ນຕໍແຫຼ່ງນ້ໍາມັນຖືກປິດ.
8. ອອກຈາກຊອບແວປະຕິບັດການ, ປິດຄອມພິວເຕີ, ແລະປິດພະລັງງານແມ່ຂ່າຍ.
ເອົາໃຈໃສ່:
1. ໂກນເຫລັກຢູ່ໃນຄາງກະໄຕຂອງເຄື່ອງທົດສອບຄວນຖືກຖອດອອກຢ່າງເປັນປົກກະຕິເພື່ອໃຫ້ຄາງກະໄຕສະອາດ.
ເມື່ອເຮັດຄວາມສະອາດອຸປະກອນແລະການຮັກສາສຸຂະອະນາໄມໃນສະພາບແວດລ້ອມທີ່ເຮັດວຽກ, ໄຟຟ້າຄວນຈະຖືກຕັດອອກ
ໃນລະຫວ່າງການທົດລອງ, ຖ້າປໍ້ານໍ້າມັນຢຸດເຮັດວຽກຢ່າງກະທັນຫັນ, ນໍ້າໜັກທີ່ນຳໃຊ້ຄວນຖືກຖອດອອກ, ກວດກາ, ແລະປ້ຳນ້ຳມັນຄວນປິດເປີດໃໝ່.
ເມື່ອເຄື່ອງທົດສອບຖືກລະງັບຊົ່ວຄາວ, ມໍເຕີປໍ້ານໍ້າມັນຄວນປິດ, ແລະຕັ່ງນັ່ງທົດສອບຄວນຖືກຫຼຸດລົງຫຼັງຈາກການທົດສອບສໍາເລັດ. piston ຂອງກະບອກນ້ໍາມັນບໍ່ຄວນຕົກຢູ່ລຸ່ມຂອງກະບອກແລະໄຫຼອອກໃນໄລຍະທີ່ແນ່ນອນເພື່ອຄວາມສະດວກໃນການນໍາໃຊ້ໃນອະນາຄົດ.
5. ຫຼີກລ່ຽງການປ່ອຍໃຫ້ອຸປະກອນປຽກຊຸ່ມ ຫຼື ແຕະກັບສານຂອງແຫຼວ ແລະ ປ້ອງກັນບໍ່ໃຫ້ອຸປະກອນຖືກສັ່ນ ຫຼື ກະທົບ.
6. ກະລຸນາຢ່າອອກຈາກຫ້ອງປະຕິບັດການແລະກົດປຸ່ມຢຸດສຸກເສີນໃນກໍລະນີສຸກເສີນ
7. ຢູ່ຫ່າງຈາກການແຊກແຊງແມ່ເຫຼັກ
8. ບຸກຄະລາກອນດ້ານວິຊາການທີ່ບໍ່ແມ່ນມືອາຊີບບໍ່ໄດ້ຖືກອະນຸຍາດໃຫ້ແກ້ໄຂໂຄງການຊອບແວຂອງເຄື່ອງທົດສອບ
ການຮັບປະກັນຄຸນນະພາບ
ບໍລິສັດຮັບປະກັນວ່າຜະລິດຕະພັນທັງຫມົດແມ່ນຜະລິດຕາມມາດຕະຖານແຫ່ງຊາດທີ່ສອດຄ້ອງກັນ;
ບໍລິສັດຮັບປະກັນວ່າອຸປະກອນພາຍໃນທັງຫມົດແມ່ນມາຈາກຍີ່ຫໍ້ທີ່ມີຊື່ສຽງທີ່ມີຄຸນນະພາບດີເລີດ;
ບໍລິສັດຮັບປະກັນວ່າອຸປະກອນຂອງຕ່າງປະເທດທັງຫມົດແມ່ນຜະລິດຕະພັນຕົ້ນສະບັບແລະຂອງແທ້ຈາກໂຮງງານ;
ບໍລິສັດຮັບປະກັນວ່າຜະລິດຕະພັນທີ່ສະຫນອງໃຫ້ແກ່ຜູ້ໃຊ້ແມ່ນຍີ່ຫໍ້ເຄື່ອງຈັກຕົ້ນສະບັບໃຫມ່;
ບໍລິສັດຮັບປະກັນວ່າຜະລິດຕະພັນທັງໝົດທີ່ອອກຈາກໂຮງງານຜ່ານການກວດກາຢ່າງເຂັ້ມງວດຕາມຂັ້ນຕອນ;
ບໍລິສັດສັນຍາວ່າຈະຮັບເອົາລູກຄ້າໄປຢ້ຽມຢາມແລະເບິ່ງແຍງໂຮງງານໄດ້ທຸກເວລາ.
ເງື່ອນໄຂການກະກຽມຜູ້ໃຊ້
ຜູ້ປະຕິບັດງານທີ່ມີຄວາມຊໍານິຊໍານານໃນການນໍາໃຊ້ຄອມພິວເຕີ;
ຜູ້ໃຊ້ຄວນຊີ້ແຈງວິທີການທົດສອບແລະລາຍລະອຽດມາດຕະຖານທີ່ການທົດລອງຫມາຍເຖິງແລະປະຕິບັດຕາມ;
ສະຫນອງຕົວຢ່າງທີ່ໄດ້ຮັບການທົດສອບໃນເຄື່ອງນີ້ສໍາລັບການທົດສອບຜະລິດຕະພັນ, ການກວດກາໂຮງງານ, ແລະການທົດສອບການປັບຕົວເຄື່ອງ;
ພື້ນທີ່, ພື້ນຖານ, ການສະຫນອງພະລັງງານ, ແລະອື່ນໆທີ່ຈໍາເປັນສໍາລັບການຕິດຕັ້ງຜະລິດຕະພັນ;
ຫ້ອງທົດລອງຄວນໄດ້ຮັບການຕິດຕັ້ງເຄື່ອງປັບອາກາດ, ມີການຄວບຄຸມອຸນຫະພູມໃນລົ່ມລະຫວ່າງ 15-25 ℃ແລະຄວາມຊຸ່ມຊື່ນ <70%;
ຮັບຜິດຊອບການຮັບ, ເກັບຮັກສາ, ຍົກຍ້າຍຜະລິດຕະພັນ;
ການນໍາໃຊ້ແລະການບໍາລຸງຮັກສາ
ພະນັກງານທົດສອບຄົງທີ່ແລະໄດ້ຮັບການຝຶກອົບຮົມຕ້ອງໄດ້ຮັບການຈັດລຽງເພື່ອດໍາເນີນການຜະລິດຕະພັນ, ແລະຄົນອື່ນບໍ່ໄດ້ຖືກອະນຸຍາດໃຫ້ດໍາເນີນການ;
ເມື່ອນໍາໃຊ້ຜະລິດຕະພັນ, ຜູ້ປະກອບການຄວນປະຕິບັດຕາມການຝຶກອົບຮົມແລະຄໍາແນະນໍາທີ່ພວກເຂົາໄດ້ຮັບເພື່ອດໍາເນີນການໃນຂັ້ນຕອນທີ່ຖືກຕ້ອງ;
ຜູ້ປະຕິບັດງານຄວນຈະມີຄວາມຊໍານິຊໍານານໃນມາດຕະຖານການທົດສອບທີ່ສອດຄ້ອງກັນເພື່ອກໍານົດຜົນການທົດສອບຢ່າງຖືກຕ້ອງ;
ຜູ້ປະຕິບັດງານຕ້ອງອ່ານຄູ່ມືການເປັນເຈົ້າພາບແລະຄູ່ມືຊອບແວຢ່າງລະມັດລະວັງ;
ໃນຕອນທ້າຍຂອງການທົດລອງ, ປິດເຄື່ອງໃນຄໍາສັ່ງທີ່ຖືກຕ້ອງແລະຕັດແຫຼ່ງພະລັງງານທັງຫມົດ;
ຖ້າອຸປະກອນເສີມທົດສອບທີ່ເຮັດດ້ວຍຕົວເອງຖືກນໍາໃຊ້, ໂຄງສ້າງຕົ້ນສະບັບຂອງຜະລິດຕະພັນຈະຕ້ອງບໍ່ປ່ຽນແປງຫຼືເສຍຫາຍໃນລະຫວ່າງການຕິດຕັ້ງ;
ຖ້າມີສະຖານະການຜິດປົກກະຕິຫຼືຄວາມລົ້ມເຫຼວຂອງໄຟຟ້າໃນລະຫວ່າງການເຮັດວຽກຂອງເຄື່ອງທົດສອບ, ແລະປຸ່ມເລີ່ມຕົ້ນຫຼືຢຸດບໍ່ເຮັດວຽກ, ພະລັງງານຄວນໄດ້ຮັບການຕັດທັນທີເພື່ອຢຸດເຄື່ອງທົດສອບຈາກການເຮັດວຽກ;
ພາກສ່ວນສະກູແລະລະບົບສາຍສົ່ງຄວນໄດ້ຮັບການເຄືອບຢ່າງເປັນປົກກະຕິດ້ວຍນ້ໍາມັນຫລໍ່ລື່ນເພື່ອປ້ອງກັນບໍ່ໃຫ້ friction ແຫ້ງ;
ຖ້າຜະລິດຕະພັນຜິດປົກກະຕິ, ກະລຸນາຕິດຕໍ່ພະແນກບໍລິການລູກຄ້າຂອງພວກເຮົາໃຫ້ທັນເວລາແລະຢ່າຖອດມັນໂດຍກົງໂດຍບໍ່ມີການອະນຸຍາດ;
ຢ່າດັດແປງຜະລິດຕະພັນດ້ວຍຕົວຂອງທ່ານເອງ.

Shandong DRICK INSTRUMENTS CO.,LTD
ຂໍ້ມູນບໍລິສັດ
Shandong Drick Instruments Co., Ltd, ສ່ວນໃຫຍ່ແມ່ນມີສ່ວນຮ່ວມໃນການຄົ້ນຄວ້າແລະການພັດທະນາ, ການຜະລິດແລະການຂາຍເຄື່ອງມືການທົດສອບ.
ບໍລິສັດໄດ້ສ້າງຕັ້ງຂຶ້ນໃນປີ 2004.
ຜະລິດຕະພັນຖືກນໍາໃຊ້ໃນຫນ່ວຍງານຄົ້ນຄ້ວາວິທະຍາສາດ, ສະຖາບັນການກວດກາຄຸນນະພາບ, ວິທະຍາໄລ, ການຫຸ້ມຫໍ່, ເຈ້ຍ, ການພິມ, ຢາງແລະພາດສະຕິກ, ສານເຄມີ, ອາຫານ, ຢາ, ແຜ່ນແພ, ແລະອຸດສາຫະກໍາອື່ນໆ.
Drick ເອົາໃຈໃສ່ກັບການປູກຝັງພອນສະຫວັນແລະການສ້າງທີມງານ, ຍຶດຫມັ້ນກັບແນວຄວາມຄິດການພັດທະນາຂອງຄວາມເປັນມືອາຊີບ, dedication.pragmatism, ແລະປະດິດສ້າງ.
ຍຶດຫມັ້ນໃນຫຼັກການຂອງລູກຄ້າ, ແກ້ໄຂຄວາມຕ້ອງການອັນຮີບດ່ວນທີ່ສຸດແລະການປະຕິບັດຂອງລູກຄ້າ, ແລະສະຫນອງການແກ້ໄຂຊັ້ນທໍາອິດໃຫ້ກັບລູກຄ້າດ້ວຍຜະລິດຕະພັນທີ່ມີຄຸນນະພາບສູງແລະເຕັກໂນໂລຢີທີ່ກ້າວຫນ້າ.








